Measuring thrust of cheap 1S coreless motors (for a possible ESP32 μdrone)
I recently took part in a hackathon, where each team was given a DJI Tello drone for hacking. We had a lot of fun and I really liked this small, nimble drone, which could be flown inside and had a camera, which allowed you to stream video to your computer via WiFi (and then for example use Python to do Computer Vision).
At some point I thought – why not make such a drone, based on the ESP32? It is powerful enought to stream video, has built-in WiFi/Bluetooth and is really cheap. So I had a look on the internet, because I was sure that somebody alredy did something similar and published it. Well, I was wrong. The only two projects I found were the ESPCopter (which is based on ESP8266 and has no camera) or Electronoobs’s Arduino drone (which uses the NRF24 and isn’t really finished).
Of course the fact that there is nothing on the internet can mean two things – either I am the first to think about it (unlikely) or there is some sort of limitation. The first, which came into my mind, is that the coreless/brushed motors (used in most of these small drones) are not powerful enough to lift such an assembly. So I decided to test their thrust.
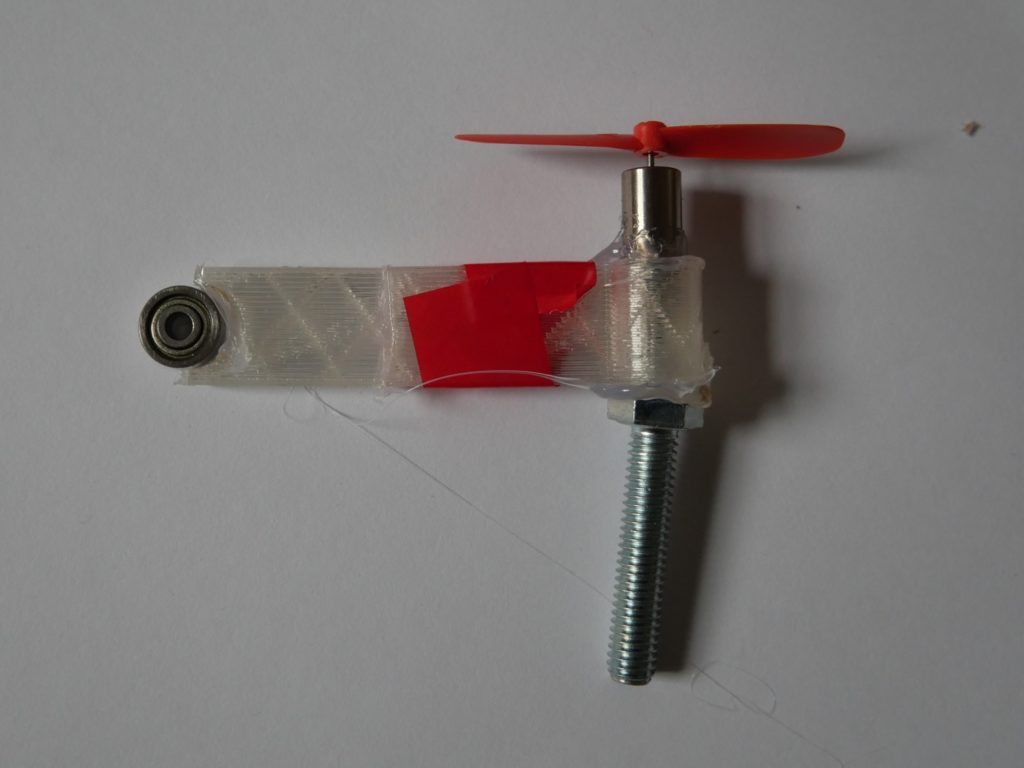
You could use a load cell with relatively complicated circuitry and spend half a day messing with it. I did it the quick & easy way – I made a 3D printed lever, with a bearing on one side (which fixes it to the table) and the motor itself on the other side (under which I fixed a screw and varied the number of nuts as a load). Knowing the weight of the screw & nuts, I could calculate how much extra mass can the motor lift (called cargo in the table below). Then I weighted half the lever with the motor, added this to the cargo and multiplied this with the gravitational constant to get the net thrust.
| voltage [V] | current [A] | cargo [g] | thrust [mN] |
| 3.2 | 0.82 | 7.8 | 11.8 |
| 3.7 | 0.95 | 12 | 16.7 |
| 4.2 | 1.14 | 14 | 18.7 |
So if I wanted to make a small quadcopter (similar to the ESPCopter), I’d need to keep the weight of the driving circuitry, battery and camera under roughly 30 g. Also keep in mind that you need to have some reserve for accelerating. Just for comparison: ESPCopter’s weight is 28 g.
So is it possible?
I think so. The OV2640 camera costs two dollars and weigths about a gram. The heaviest thing would be the battery, since these motors draw a surprising amount of current. A 600 mAh battery I found on HobbyKing weigths 15.8 grams and would give a theoretical flight time of 7 minutes @ 5 A current draw.
Maybe I’m missing something, but why not put it with the load on a scale and measure how much it “lightened” it? (maybe you don’t have a scale and the mass of the screw and nuts was taken from the datasheet?)
Hi, good point. I have a relatively precise lab scale, but I wasn’t sure how accurate would the measurement be with all those vibrations and also I wanted to measaure the thrust without ground effect (it was measured about 1 metre above ground on a tripod – this would be hardly possible on a scale). So I thought that this is the most “mistake-proof” method…